Robots still lack basic social tools to interact smoothly with the average human. The problem is that human interaction is complex, composed of conscious and unconscious signals. A lot of work has been done on direct communication, e.g. visual and speech recognition, however a lot of work still has to be done on unconscious, indirect signaling and its impact on user perception and interaction comfort. This is an exploratory, multidisciplinary research building on foundations of psychology, neuroscience, physiology, mechanics and data science.

Empathic mirroring
Mirroring Techniques for Social Robots
Hypothesis:
Mirroring the human posture and gesture style will improve the human-robot interaction. (based on human-human interaction studies)
Related products
-
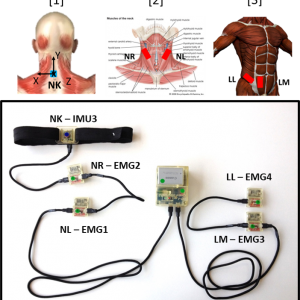 Human Research
Human ResearchHuman sensing
-
 Human Research
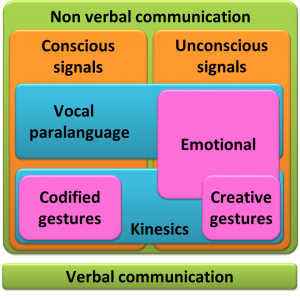
Human ResearchMulti-modal communication